Informe - Transformaciones lineales
INSTITUTO TECNICO INDUSTRIAL PASCUAL BRAVO
TRABAJO
Informe - Transformaciones lineales
REALIZADO POR
DANIEL PINO MORA
PROFESOR
RUTH BEATRIZ MORENO ECHAVARRÍA
MEDELLÍN
2023
¿Qué es una transformación lineal?
Una transformación lineal es una función matemática que opera sobre vectores en un espacio vectorial y cumple con dos propiedades fundamentales: aditividad y homogeneidad.
Las transformaciones lineales son un concepto fundamental en álgebra lineal y tienen una amplia aplicación en diversas áreas de las matemáticas y la ciencia, incluyendo la geometría, la física, la informática y la ingeniería. Ejemplos comunes de transformaciones lineales incluyen rotaciones, escalado, reflexiones y proyecciones en espacios vectoriales. Estas transformaciones son importantes porque preservan las propiedades estructurales de los espacios vectoriales, como la linealidad y la independencia lineal, lo que facilita su estudio y aplicación en diversos contextos.
¿Cuáles son las condiciones para que exista una transformación lineal?
Para que exista una transformación lineal, es necesario que se cumplan ciertas condiciones fundamentales. Estas condiciones se aplican a una función que toma vectores de un espacio vectorial y devuelve vectores en otro espacio vectorial. A continuación, se enumeran las condiciones necesarias:
Preservación de la adición: La transformación lineal T debe preservar la propiedad de adición en ambos espacios vectoriales. Esto significa que para cualquier par de vectores u y v en el dominio de T, la transformación debe cumplir la siguiente propiedad:
T(u + v) = T(u) + T(v)
En otras palabras, la suma de los vectores transformados debe ser igual a la transformación de la suma de los vectores originales.
Preservación de la multiplicación por escalar: La transformación lineal T debe preservar la propiedad de multiplicación por escalar en el dominio y codominio. Esto se expresa de la siguiente manera:
T(cu) = cT(u)
Donde "c" es una constante escalar y "u" es un vector en el dominio de T. La transformación de un vector multiplicado por una constante escalar debe ser igual a la constante multiplicada por la transformación del vector original.
Cinco propiedades o teoremas de las transformaciones lineales
Las transformaciones lineales tienen varias propiedades y teoremas importantes que son fundamentales en el álgebra lineal y otras áreas de las matemáticas y la ciencia. A continuación, te presento cinco propiedades o teoremas destacados relacionados con las transformaciones lineales:
Preservación de la combinación lineal: Si T es una transformación lineal que mapea vectores u y v a vectores T(u) y T(v), entonces T preserva cualquier combinación lineal de u y v. Esto se expresa como:
T(cu + dv) = cT(u) + dT(v)
Donde "c" y "d" son constantes escalares.
Núcleo (kernel) y rango (imagen): Para una transformación lineal T, el núcleo es el conjunto de vectores en el dominio que se mapean al vector cero en el codominio (T(u) = 0). El rango es el conjunto de todos los vectores en el codominio que se pueden obtener mediante T. Estos conjuntos son importantes para comprender la estructura de T y su inyectividad (una transformación inyectiva mapea vectores distintos a vectores distintos) y sobreyectividad (una transformación sobreyectiva abarca todo el codominio).
Teorema del rango y la nulidad: El teorema del rango establece que el rango (dimensión del rango) de una transformación lineal T más la nulidad (dimensión del núcleo) de T es igual a la dimensión del espacio vectorial de partida. Matemáticamente:
dim(Rango(T)) + dim(Núcleo(T)) = dim(Dominio de T)
Teorema de la transformación inversa: Si T es una transformación lineal biyectiva (tanto inyectiva como sobreyectiva), entonces existe una transformación inversa T^(-1) que deshace la transformación. Esto significa que T^(-1) mapea los vectores en el codominio de T de vuelta a los vectores en el dominio original, y cumple con las propiedades de una transformación lineal.
Composición de transformaciones lineales: La composición de dos transformaciones lineales T y S también es una transformación lineal. Si aplicas primero S y luego T, la composición resultante T(S(u)) es una transformación lineal. Esto es útil en la construcción de transformaciones más complejas a partir de transformaciones más simples.
Ejemplo de transformación lineal
Un ejemplo de una transformación lineal comúnmente utilizado es la transformación de rotación en el plano cartesiano. Esta transformación toma un vector bidimensional (en R²) y lo rota alrededor del origen en un ángulo θ en sentido antihorario. La matriz de transformación que realiza esta operación es:
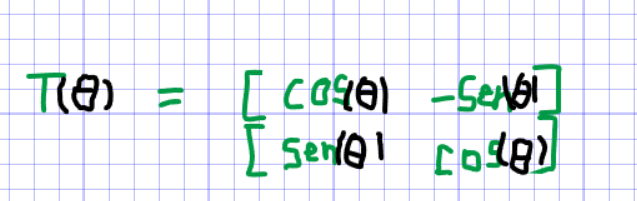
Donde θ es el ángulo de rotación.
Para ver que esta es una transformación lineal, puedes comprobar que cumple con las dos propiedades fundamentales de las transformaciones lineales:
Preservación de la adición: Si tomas dos vectores u y v, y aplicas la transformación de rotación T(θ) a la suma de esos vectores, obtendrás la suma de las transformaciones individuales:
T(θ)(u + v) = T(θ)(u) + T(θ)(v)
Esto demuestra que la transformación lineal preserva la adición.
Preservación de la multiplicación por escalar: Si multiplicas un vector u por una constante escalar "c" y luego aplicas la transformación de rotación T(θ), obtendrás el mismo resultado que si primero aplicas la transformación y luego multiplicas el resultado por "c":
T(θ)(cu) = c * T(θ)(u)
Esto demuestra que la transformación lineal preserva la multiplicación por escalar.
Cómo probar dicha transformación lineal
Para probar que la transformación de rotación en el plano cartesiano es una transformación lineal, debes demostrar que cumple con las dos propiedades fundamentales de las transformaciones lineales: la preservación de la adición y la preservación de la multiplicación por escalar. Aquí está cómo puedes hacerlo:
Preservación de la adición:
Para demostrar que la transformación de rotación preserva la adición, toma dos vectores u y v en el plano cartesiano y aplica la transformación de rotación a su suma:
Sea u = (x₁, y₁) y v = (x₂, y₂) dos vectores en el plano.
Aplicamos la transformación de rotación T(θ) a la suma de u y v:
T(θ)(u + v) = T(θ)((x₁ + x₂, y₁ + y₂))
Ahora, calculamos la transformación individual de u y v:
T(θ)(u) = T(θ)(x₁, y₁) = (x₁ * cos(θ) - y₁ * sin(θ), x₁ * sin(θ) + y₁ * cos(θ))
T(θ)(v) = T(θ)(x₂, y₂) = (x₂ * cos(θ) - y₂ * sin(θ), x₂ * sin(θ) + y₂ * cos(θ))
Sumamos estas transformaciones individuales:
T(θ)(u) + T(θ)(v) = (x₁ * cos(θ) - y₁ * sin(θ), x₁ * sin(θ) + y₁ * cos(θ)) + (x₂ * cos(θ) - y₂ * sin(θ), x₂ * sin(θ) + y₂ * cos(θ))
Distribuimos la suma y combinamos términos semejantes:
= ((x₁ * cos(θ) - y₁ * sin(θ) + x₂ * cos(θ) - y₂ * sin(θ)), (x₁ * sin(θ) + y₁ * cos(θ) + x₂ * sin(θ) + y₂ * cos(θ)))
Esta expresión es igual a T(θ)(u + v). Por lo tanto, hemos demostrado que la transformación de rotación preserva la adición.
Preservación de la multiplicación por escalar:
Para demostrar que la transformación de rotación preserva la multiplicación por escalar, toma un vector u = (x, y) y un escalar "c" y aplica la transformación de rotación T(θ) a cu:
T(θ)(cu) = T(θ)(c * x, c * y)
Calculamos la transformación de T(θ) de u y luego multiplicamos por "c":
T(θ)(cu) = c * T(θ)(x, y)
Esto demuestra que la transformación de rotación preserva la multiplicación por escalar.

Comentarios
Publicar un comentario